A study conducted by National Chung Hsing University has revealed how jumping spiders use a silk dragline to stabilize themselves in mid-air and control their landings.
Slow-motion footage revealed the spiders use their silk draglines to stabilize their bodies and to brake, enabling them to land poised and ready to pounce on prey.
Scientists say that the discovery could inspire new robot design.
Photo: Tsai Shu-yuan, Taipei Times
The findings appeared on the Journal of the Royal Society Interface Web site on Aug. 7 and were also reported on by the BBC and Science News.
Interface is a peer-reviewed online scientific journal that started publication in 2004, and includes reviews, research articles and short reports from the interface between physical sciences and life sciences.
The study, conducted by physics professor Chi Kai-jung (紀凱容), used high-speed cameras — 1,000 frames per second — to shoot more than 10,000 photographs of the Adanson’s house jumper, Hasarius adansoni, a species of jumping spider.
Chi said academics had concluded that macrovertebrates, such as humans, kangaroos or lizards, maintained balance by using inertia from swinging limbs or tails, while other creatures utilized aerodynmaic forces by flapping wings.
“My study may have provided a third possibility of how life in nature keeps balance,” Chi said, pointing to how the Adanson’s house jumper is able to maintain balance — even after flipping in the air — by using one strand of silk.
Chi said the key lay in the fact that the spider places a silk dragline on the ground before it jumps, and continues to pump out the silk while still in the air, adding that the spider was able to change direction in the air through tightening or loosening an internal organ, which Chi describes in the article as a type of friction brake.
The study discovered that the spider, 6mm in length, was able to jump 80mm horizontally in 1.5 seconds and was able to quickly regain its footing or change direction if it used a silk dragline. Non-silk jumping spiders without the draglines would land badly more often and take five times as long to steady themselves.
Chi said that the study integrated research into the kinesiology of spiders and the mechanics of spider silk, adding that the results may be applied to rock climbing equipment as well and robots.

THE HAWAII FACTOR: While a 1965 opinion said an attack on Hawaii would not trigger Article 5, the text of the treaty suggests the state is covered, the report says NATO could be drawn into a conflict in the Taiwan Strait if Chinese forces attacked the US mainland or Hawaii, a NATO Defense College report published on Monday says. The report, written by James Lee, an assistant research fellow at Academia Sinica’s Institute of European and American Studies, states that under certain conditions a Taiwan contingency could trigger Article 5 of NATO, under which an attack against any member of the alliance is considered an attack against all members, necessitating a response. Article 6 of the North Atlantic Treaty specifies that an armed attack in the territory of any member in Europe,

FLU SEASON: Twenty-six severe cases were reported from Tuesday last week to Monday, including a seven-year-old girl diagnosed with influenza-associated encephalopathy Nearly 140,000 people sought medical assistance for diarrhea last week, the Centers for Disease Control (CDC) said on Tuesday. From April 7 to Saturday last week, 139,848 people sought medical help for diarrhea-related illness, a 15.7 percent increase from last week’s 120,868 reports, CDC Epidemic Intelligence Center Deputy Director Lee Chia-lin (李佳琳) said. The number of people who reported diarrhea-related illness last week was the fourth highest in the same time period over the past decade, Lee said. Over the past four weeks, 203 mass illness cases had been reported, nearly four times higher than the 54 cases documented in the same period
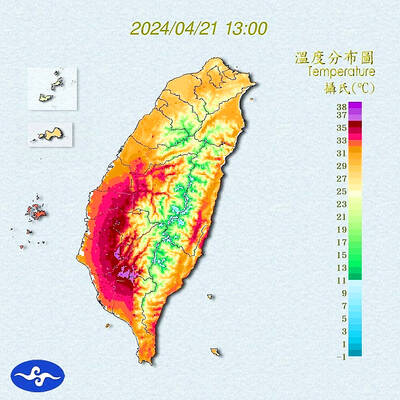
Heat advisories were in effect for nine administrative regions yesterday afternoon as warm southwesterly winds pushed temperatures above 38°C in parts of southern Taiwan, the Central Weather Administration (CWA) said. As of 3:30pm yesterday, Tainan’s Yujing District (玉井) had recorded the day’s highest temperature of 39.7°C, though the measurement will not be included in Taiwan’s official heat records since Yujing is an automatic rather than manually operated weather station, the CWA said. Highs recorded in other areas were 38.7°C in Kaohsiung’s Neimen District (內門), 38.2°C in Chiayi City and 38.1°C in Pingtung’s Sandimen Township (三地門), CWA data showed. The spell of scorching

A group of Taiwanese-American and Tibetan-American students at Harvard University on Saturday disrupted Chinese Ambassador to the US Xie Feng’s (謝鋒) speech at the school, accusing him of being responsible for numerous human rights violations. Four students — two Taiwanese Americans and two from Tibet — held up banners inside a conference hall where Xie was delivering a speech at the opening ceremony of the Harvard Kennedy School China Conference 2024. In a video clip provided by the Coalition of Students Resisting the CCP (Chinese Communist Party), Taiwanese-American Cosette Wu (吳亭樺) and Tibetan-American Tsering Yangchen are seen holding banners that together read: